
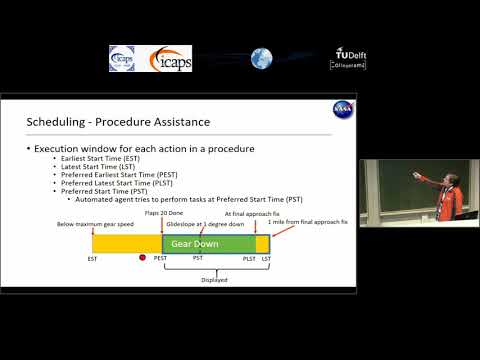
J. Benton, David Smith, John Kaneshige, Leslie Keely, Thomas Stucky
CHAP-E: A Plan Execution Assistant for Pilots
Recordings
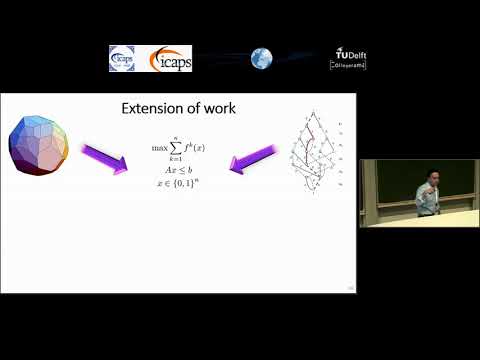
Arvind U. Raghunathan, David Bergman, John Hooker, Thiago Serra, Shingo Kobori
The Integrated Last-Mile Transportation Problem (ILMTP)

Pallavi Manohar, Pradeep Varakantham, Hoong Chuin Lau
Bounded Rank Optimization for Effective and Efficient Emergency Response

Chiara Piacentini, Margarita P. Castro, Andre A. Cire, J. Christopher Beck
Compiling Optimal Numeric Planning to Mixed Integer Linear Programming

Kyle E. C. Booth, Minh Do, J. Christopher Beck, Eleanor Rieffel, Davide Venturelli, Jeremy Frank
Comparing and Integrating Constraint Programming and Temporal Planning for Quantum Circuit Compilation
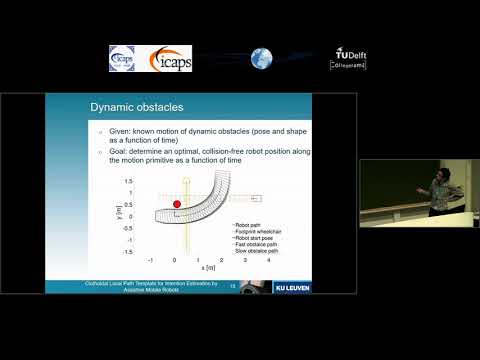
Kevin Denis, Johan Philips, Herman Bruyninckx and Eric Demeester
Clothoidal local path template for intention estimation by robotic assistive wheelchairs

Fangda Li, Ankit V. Manerikar, Avinash C. Kak
RMPD — A Recursive Mid-Point Displacement Algorithm for Path Planning
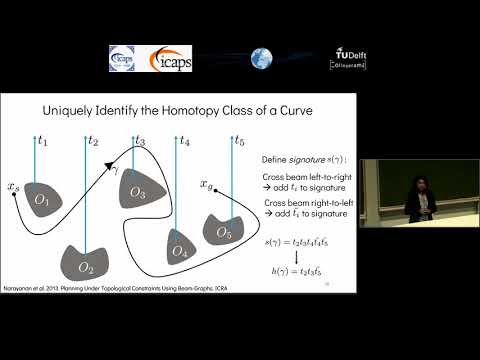
Vinitha Ranganeni, Oren Salzman, Maxim Likhachev
Effective Footstep Planning for Humanoids Using Homotopy-Class Guidance

Federico Pecora, Henrik Andreasson, Masoumeh Mansouri, Vilian Petkov
A Loosely-Coupled Approach for Multi-Robot Coordination, Motion Planning and Control

Arthur Bit-Monnot, Rafael Bailon-Ruiz, Simon Lacroix
A Local Search Approach to Observation Planning with Multiple UAVs

Maciej Przybylski
AD*-Cut: A Search-Tree Cutting Anytime Dynamic A* Algorithm
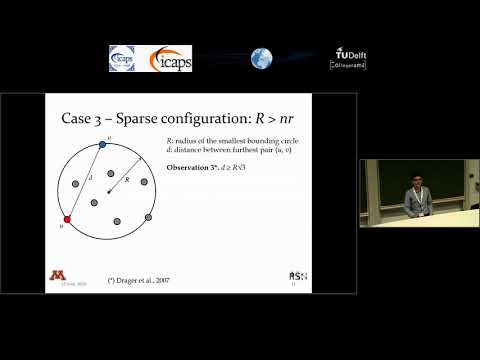
K. Selim Engin, Volkan Isler
Minimizing Movement to Establish the Connectivity of Randomly Deployed Robots

Björn Schäpers, Tim Niemueller, Gerhard Lakemeyer, Martin Gebser, Torsten Schaub
ASP-Based Time-Bounded Planning for Logistics Robots

Michael W. Lanighan, Takeshi Takahashi, Roderic A. Grupen
Planning Robust Manual Tasks in Hierarchical Belief Spaces
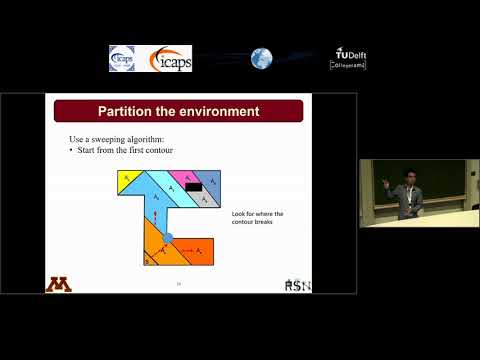
Minghan Wei, Volkan Isler
A Log-Approximation for Coverage Path Planning with the Energy Constraint

Sarath Sreedharan, Tathagata Chakraborti, Subbarao Kambhampati
Handling Model Uncertainty and Multiplicity in Explanations via Model Reconciliation

Aditya Mandalika, Oren Salzman, Siddhartha Srinivasa
Lazy Receding Horizon A* for Efficient Path Planning in Graphs with Expensive-to-Evaluate Edges
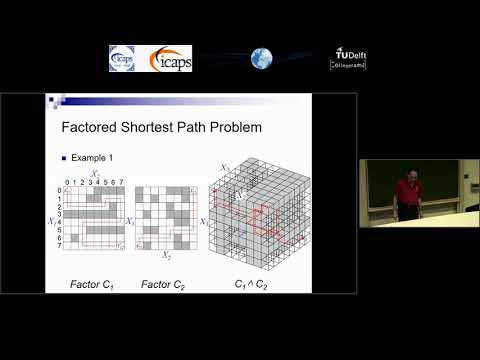
Zhi Wang, Liron Cohen, Sven Koenig, T. K. Satish Kumar
The Factored Shortest Path Problem and Its Applications in Robotics

Giancarlo Nicolò, Sergio Ferrer, Miguel A. Salido, Federico Barber and Adriana Giret
A Multi-Agent Framework to solve energy-aware unrelated parallel machine scheduling problem with machine-dependent energy consumption and sequence-dependent setup-time

Krishnendu Chatterjee, Wolfgang Dvořák, Monika Henzinger, Alexander Svozil
Algorithms and Conditional Lower Bounds for Planning Problems