

Sarah Keren, Avigdor Gal, Erez Karpas
Strong Stubborn Sets for Efficient Goal Recognition Design
Recordings

Anna Wilhelm, Marcel Steinmetz, Jörg Hoffmann
On Stubborn Sets and Planning with Resources

Michael Cashmore, Andrew Coles, Bence Cserna, Erez Karpas, Daniele Magazzeni, Wheeler Ruml
Temporal Planning while the Clock Ticks

Nika Haghtalab, Simon Mackenzie, Ariel D. Procaccia, Oren Salzman, Siddhartha S. Srinivasa
The Provable Virtue of Laziness in Motion Planning

Tomas Geffner, Hector Geffner
Compact Policies for Fully Observable Non-Deterministic Planning as SAT

Tiep Le, Francesco Fabiano, Tran Cao Son, Enrico Pontelli
EFP and PG-EFP: Epistemic Forward Search Planners in Multi-Agent Domains

Zachary N. Sunberg, Mykel J. Kochenderfer
Online Algorithms for POMDPs with Continuous State, Action, and Observation Spaces
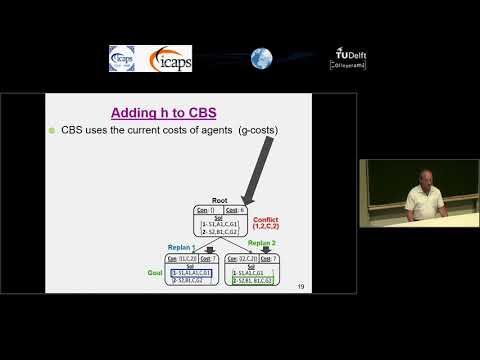
Ariel Felner, Jiaoyang Li, Eli Boyarski, Hang Ma, Liron Cohen, T. K. Satish Kumar, Sven Koenig
Adding Heuristics to Conflict-Based Search for Multi-Agent Path Finding

Tony Allard, Charles Gretton, Patrik Haslum
A TIL-Relaxed Heuristic for Planning with Time Windows

Gaojian Fan, Robert Holte, Martin Mueller
MS-Lite: A Lightweight, Complementary Merge-and-Shrink Method

Daniel Muller, Erez Karpas
Value Driven Landmarks for Oversubscription Planning

Michaela Klauck, Marcel Steinmetz, Jörg Hoffmann, Holger Hermanns
Compiling Probabilistic Model Checking into Probabilistic Planning

Johannes Blum, Sabine Storandt
Scalability of Route Planning Techniques

Shashank Shekhar, Ronen I. Brafman
Representing and Planning with Interacting Actions and Privacy

David Speck, Florian Geißer, Robert Mattmüller
Symbolic Planning with Edge-Valued Multi-Valued Decision Diagrams
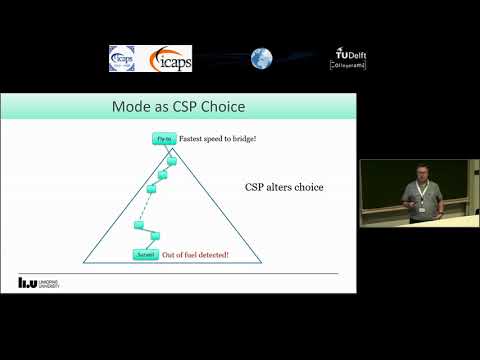
Mikael Nilsson, Jonas Kvarnström, Patrick Doherty
Planning with Temporal Uncertainty, Resources and Non-Linear Control Parameters

Roman Bartak, Adrien Maillard, Rafael Cauê Cardoso
Validation of Hierarchical Plans via Parsing of Attribute Grammars
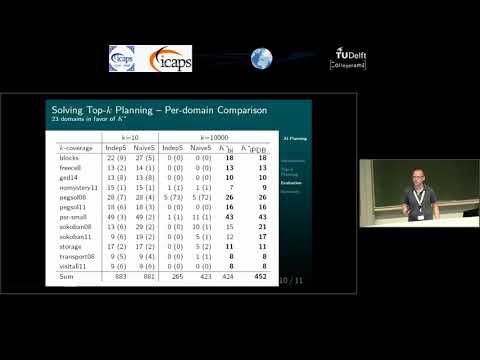
Michael Katz, Shirin Sohrabi, Octavian Udrea, Dominik Winterer
A Novel Iterative Approach to Top-k Planning

Alban Grastien, Enrico Scala
Sampling Strategies for Conformant Planning

Vahid Riahi, M. A. Hakim Newton, Kaile Su, Abdul Sattar
Local Search for Flowshops with Setup Times and Blocking Constraints