

Binda Pandey, Jussi Rintanen
Planning for Partial Observability by SAT and Graph Constraints
Recordings

Ryo Kuroiwa, Alex Fukunaga
Batch Random Walk for GPU-Based Classical Planning
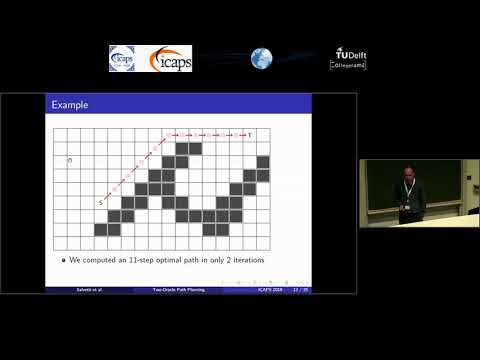
Matteo Salvetti, Adi Botea, Alfonso Emilio Gerevini, Daniel Harabor, Alessandro Saetti
Two-Oracle Optimal Path Planning on Grid Maps

Salomé Eriksson, Gabriele Röger, Malte Helmert
A Proof System for Unsolvable Planning Tasks

Daniel Höller, Pascal Bercher, Gregor Behnke, Susanne Biundo
A Generic Method to Guide HTN Progression Search with Classical Heuristics

Max Waters, Bernhard Nebel, Lin Padgham, Sebastian Sardina
Plan Relaxation via Action Debinding and Deordering
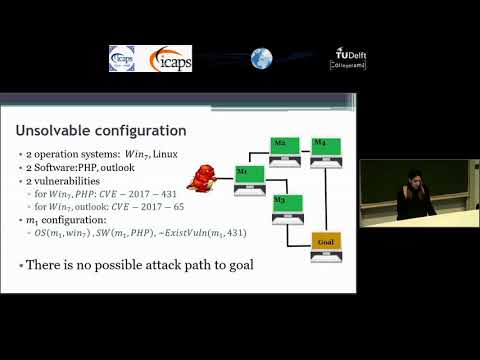
Dorin Shmaryahu, Guy Shani, Joerg Hoffmann, Marcel Steinmetz
Simulated Penetration Testing as Contingent Planning
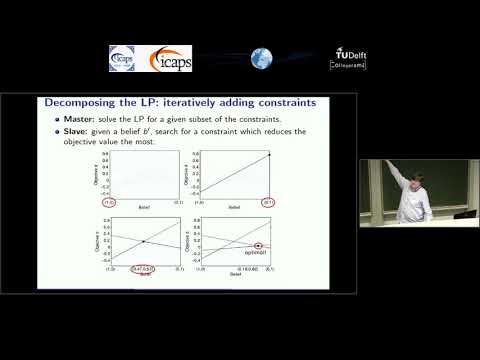
Diederik M. Roijers, Erwin Walraven, Matthijs T. J. Spaan
Bootstrapping LPs in Value Iteration for Multi-Objective and Partially Observable MDPs

Gabriele Röger, Silvan Sievers, Michael Katz
Symmetry-Based Task Reduction for Relaxed Reachability Analysis
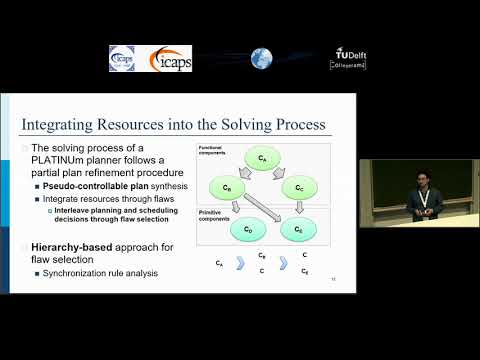
Alessandro Umbrico, Amedeo Cesta, Marta Cialdea Mayer, Andrea Orlandini
Integrating Resource Management and Timeline-Based Planning

Erli Wang, Hanna Kurniawati, Dirk P. Kroese
An On-Line Planner for POMDPs with Large Discrete Action Space: A Quantile-Based Approach
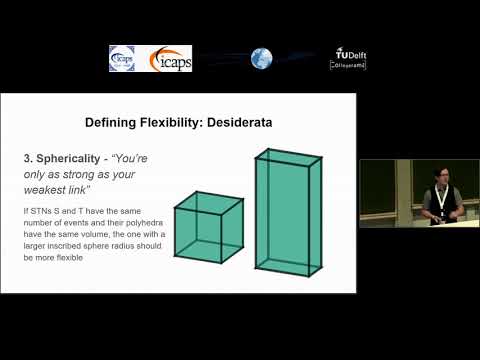
Amy Huang, Liam Lloyd, Mohamed Omar, James C. Boerkoel
New Perspectives on Flexibility in Simple Temporal Planning

Alberto Camacho, Jorge A. Baier, Christian Muise, Sheila A. McIlraith
Finite LTL Synthesis as Planning

José Carlos González, José Carlos Pulido and Fernando Fernandez
A Three-layer Planning Architecture for the Autonomous Control of Rehabilitation Therapies Based on Social Robots

Davide Nitti, Vaishak Belle, Luc De Raedt and Tinne De Laet
More for Free: A Dynamic Epistemic Framework for Conformant Planning over Transition Systems

Zeynep G. Saribatur, Volkan Patoglu and Esra Erdem
Finding Optimal Feasible Global Plans for Multiple Teams of Heterogeneous Robots using Hybrid Reasoning: An Application to Cognitive Factories

Mutsunori Banbara, Katsumi Inoue, Benjamin Kaufmann, Tenda Okimoto, Torsten Schaub, Takehide Soh, Naoyuki Tamura and Philipp Wanko
teaspoon: Solcing the Curriculum-Bases Course Timetabling Problems with Answer Set Programming
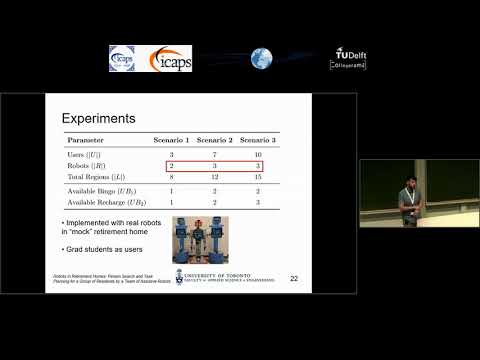
Kyle E. C. Booth, J. Christopher Beck, Sharaf C. Mohamed, Sanjif Rajaratnam and Goldie Nejat
Robots in Retirement Homes: Person Search and Task Planning for a Group of Residents by a Team of Assistive Robots

Daniel Fišer and Antonín Komenda
Fact-Alternating Mutex Groups for Classical Planning

Yanjun Li, Quan Yu and Yanjing Wang
More for Free: A Dynamic Epistemic Framework for Conformant Planning over Transition Systems