

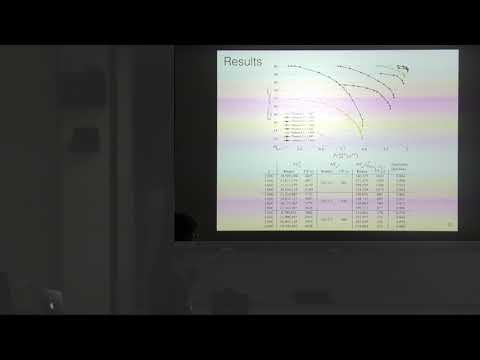
Philippe Laborie and Bilal Messaoudi
New Results for the GEOCAPE Observation Scheduling Problem
Recordings

Pedro M. d’Orey, José Azevedo and Michel Ferreira
Automated Planning and Control for High-Density Parking Lots
short paper

Supriyo Ghosh and Pradeep Varakantham
Incentivizing the Use of Bike Trailers for Dynamic Repositioning in Bike Sharing Systems

Lee Mccluskey and Mauro Vallati
Embedding Automated Planning within Urban Traffic Management Operations

Tanvi Verma, Pradeep Varakantham, Sarit Kraus and Hoong Chuin Lau
Augmenting Decisions of Taxi Drivers through Reinforcement Learning for Improving Revenues

Roderic Grupen, Michael W. Lanighan and Takeshi Takahashi
Hybrid Task Planning Grounded in Belief: Constructing Physical Copies of Simple Structures
short paper

Nakul Gopalan, Marie desJardins, Michael L. Littman, James MacGlashan, Shawn Squire, Stefanie Tellex, John Winder and Lawson L.S. Wong
Planning with Abstract Markov Decision Processes
Bruno Lacerda, David Parker and Nick Hawes
Multi-objective Policy Generation for Mobile Robots under Probabilistic Time-Bounded Guarantees

Ludovic Hofer and Quentin Rouxel
An Operational Method Toward Efficient Navigation Policies for Humanoid Robots

Matthew Crosby, Francesco Rovida, Volker Krueger and Ron Petrick
Integrating Mission and Task Planning in an Industrial Robotics Framework

Duong Le and Erion Plaku
Cooperative Multi-Robot Sampling-Based Motion Planning with Dynamics

Konstantin Yakovlev and Anton Andreychuk
Any-Angle Pathfinding For Multiple Robots Based On SIPP Algorithm
Glenn Wagner and Howie Choset
Path Planning for Multiple Agents Under Uncertainty

Venkatraman Narayanan and Maxim Likhachev
Heuristic Search on Graphs with Existence Priors for Expensive-to-Evaluate Edges

Till Hofmann, Tim Niemueller and Gerhard Lakemeyer
Initial Results on Generating Macro Actions from a Plan Database for Planning on Autonomous Mobile Robots
short paper

Valerio Sanelli, Michael Cashmore, Luca Iocchi and Daniele Magazzeni
Short-Term Human Robot Interaction through Conditional Planning and Execution

Eugenio Sebastiani, Raphaël Lallement, Luca Iocchi and Rachid Alami
Dealing with On-line Human-Robot Negotiations in Hierarchical Agent-based Task Planner

Shivam Vats, Venkatraman Narayanan and Maxim Likhachev
Learning to Avoid Local Minima in Planning for Static Environments

Breelyn Kane Styler and Reid Simmons
Plan-Time Multi-Model Switching for Motion Planning

Oren Salzman, Brian Hou and Siddhartha Srinivasa
Efficient motion planning for problems lacking optimal substructure