

Masataro Asai and Alex Fukunaga
Exploration Among and Within Plateaus in Greedy Best-First Search
Recordings

Michael Katz, Nir Lipovetzky, Dany Moshkovich and Alexander Tuisov
Adapting Novelty to Classical Planning as Heuristic Search

Maximilian Fickert and Joerg Hoffmann
Online Heuristic-Function Refinement: Learning Conjunctions for Partial Delete Relaxation

Thayne T. Walker, Nathan Sturtevant and David Chan
Using Hierarchical Constraints to Avoid Conflicts in Multi-Agent Pathfinding

Filippos Kominis and Hector Geffner
Multiagent Online Planning with Nested Beliefs and Dialogue

Hadi Salman, Elif Ayvali and Howie Choset
Multi-Agent Ergodic Coverage with Obstacle Avoidance

Qi Zhang, Satinder Singh and Edmund Durfee
Minimizing Maximum Regret in Commitment Constrained Sequential Decision Making

Louis Dressel and Mykel Kochenderfer
Efficient Decision-Theoretic Target Localization

Bence Cserna, Wheeler Ruml and Jeremy Frank
Planning Time to Think: Metareasoning for On-line Planning with Durative Actions
short paper

Marcel Steinmetz and Joerg Hoffmann
Critical-Path Dead-End Detection vs. NoGoods: Offline Equivalence and Online Learning
short paper

Patrick Speicher, Marcel Steinmetz, Daniel Gnad, Joerg Hoffmann and Alfonso Emilio Gerevini
Beyond Red-Black Planning: Limited-Memory State Variables
short paper

Sara Bernardini, Maria Fox, Derek Long and Chiara Piacentini
Boosting search guidance in problems with semantic attachments

Florian Pommerening, Malte Helmert and Blai Bonet
Abstraction Heuristics, Cost Partitioning and Network Flows
short paper

Matteo Salvetti, Adi Botea, Alessandro Saetti and Alfonso Gerevini
Compressed Path Databases with Ordered Wildcard Substitutions

Zhihui Wang, Bryan O’Gorman, Tony Tran, Eleanor Rieffel, Jeremy Frank and Minh Do
An Investigation of Phase Transitions in Single-Machine Scheduling Problems
short paper

Salomé Eriksson, Gabriele Röger and Malte Helmert
Unsolvability Certificates for Classical Planning

Gregor Behnke, Daniel Höller and Susanne Biundo
Plan-Verification for HTN Planning Problems
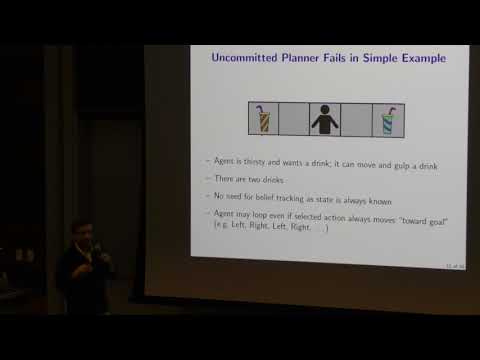
Blai Bonet, Gabriel Formica and Melecio Ponte
Completeness of Online Planners for Partially Observable Deterministic Tasks

Gaojian Fan, Martin Mueller and Robert Holte
The Two-edged Nature of Diverse Action Costs

Mohammad Abdul Aziz, Charles Gretton and Michael Norrish
A State Space Acyclicity Property for Exponentially Tighter Plan Length Bounds