

Bruno Lacerda, Fatma Faruq, David Parker and Nick Hawes
Probabilistic planning with formal guarantees for mobile service robots
Recordings

Nicola Gigante, Angelo Montanari, Andrea Orlandini, Marta Cialdea Mayer and Mark Reynolds
On timeline-based games and their complexity

Roman Barták, Jiří Švancara, Věra Škopková, David Nohejl and Ivan Krasičenko
Multi-agent path finding on real robots

Abubakr Alabbasi, Arnob Ghosh and Vaneet Aggarwal
DeepPool: Distributed Model-Free Algorithm for Ride-Sharing Using Deep Reinforcement Learning

Laszlo Treszkai and Vaishak Belle
A correctness result for synthesizing plans with loops in stochastic domains

David Speck, Florian Geißer and Robert Mattmüller
When Perfect Is Not Good Enough: On the Search Behaviour of Symbolic Heuristic Search

Sara Bernardini, Fabio Fagnani and Chiara Piacentini
Through the Lens of Sequence Submodularity
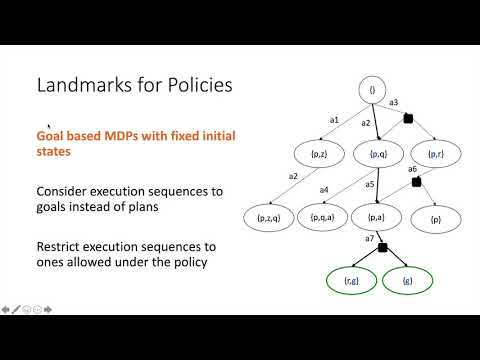
Sarath Sreedharan, Siddharth Srivastava and Subbarao Kambhampati
TLdR: Policy Summarization for Factored SSP Problems Using Temporal Abstractions

Daniel Fišer, Rostislav Horčík and Antonín Komenda
Strengthening Potential Heuristics with Mutexes and Disambiguations

Benjamin Aminof, Giuseppe De Giacomo and Sasha Rubin
Stochastic Fairness and Language-Theoretic Fairness in Planning in Nondeterministic Domains

Shawn Seiref, Tamir Jaffey, Margarita Lopatin and Ariel Felner
Solving the Watchman Route Problem on a Grid with Heuristic Search
Yossi Cohen, Roni Stern and Ariel Felner
Solving the Longest Simple Path Problem with Heuristic Search

Jonathan Ferrer-Mestres, Thomas G. Dietterich, Olivier Buffet and Iadine Chadès
Solving K-MDPs

Wesley L. Kaizer, André G. Pereira and Marcus Ritt
Sequencing Operator Counts with State-Space Search

Enrico Scala, Alessandro Saetti, Ivan Serina and Alfonso E. Gerevini
Search-Guidance Mechanisms for Numeric Planning Through Subgoaling Relaxation
Konstantin Yakovlev, Anton Andreychuk and Roni Stern
Revisiting Bounded-Suboptimal Safe Interval Path Planning

Dor Atzmon, Roni Stern, Ariel Felner, Nathan R. Sturtevant and Sven Koenig
Probabilistic Robust Multi-Agent Path Finding

Guy Shani, Roni Stern and Tommy Hefner
Privacy Preserving Planning in Stochastic Environments

Nathan R. Sturtevant, Shahaf Shperberg, Ariel Felner and Jingwei Chen
Predicting the Effectiveness of Bidirectional Heuristic Search

Jonathon Schwartz, Hanna Kurniawati and Edwin El-Mahassni
POMDP + Information-Decay: Incorporating Defender’s Behaviour in Autonomous Penetration Testing