
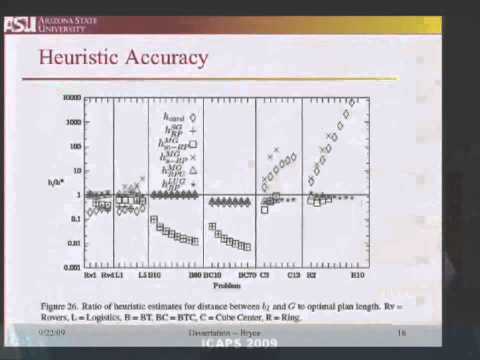
Daniel Bryce
Reachability Heuristics for Scaling Planning Under Uncertainty
Recordings

Akihiro Kishimoto, Alex Fukunaga, Adi Botea
Scalable, Parallel Best-First Search for Optimal Sequential Planning

Amanda Coles, Andrew Coles, Maria Fox, Derek Long
Extending the Use of Inference in Temporal Planning as Forwards Search (Part 3)

Amanda Coles, Andrew Coles, Maria Fox, Derek Long
Extending the Use of Inference in Temporal Planning as Forwards Search (Part 2)

Amanda Coles, Andrew Coles, Maria Fox, Derek Long
Extending the Use of Inference in Temporal Planning as Forwards Search (Part 1)

Blai Bonet, Héctor Palacios, Héctor Geffner
Automatic Derivation of Memoryless Policies and Finite-State Controllers Using Classical Planners

Christian Dornhege, Patrick Eyerich, Thomas Keller, Sebastian Trüg, Michael Brenner, Bernhard Nebel
Semantic Attachments for Domain-Independent Planning Systems

Giuseppe Della Penna, Daniele Magazzeni, Fabio Mercorio
UPMurphi: A Tool for Universal Planning on PDDL+ Problems

Jorge A. Baier, Adi Botea
Improving Planning Performance Using Low-Conflict Relaxed Plans

Kian Hsiang Low, John M. Dolan, Pradeep Khosla
Information-Theoretic Approach to Efficient Adaptive Path Planning for Mobile Robotic Environmental Sensing

Lorenz Mösenlechner, Michael Beetz
Using Physics- and Sensor-Based Simulation for High-Fidelity Temporal Projection of Realistic Robot Behavior

Juan Liu, Lukas Kuhn, Johan de Kleer
Pervasive Model Adaptation: The Integration of Planning and Information Gathering in Dynamic Production Systems

Marcello Cirillo, Lars Karlsson, Alessandro Saffiotti
A Human-Aware Robot Task Planner

Michael Kneebone, Richard Dearden
Navigation Planning in Probabilistic Roadmaps with Uncertainty

Nir Lipovetzky, Hector Geffner
Inference and Decomposition in Planning Using Causal Consistent Chains

Omar Zia Khan, Pascal Poupart, James P. Black
Minimal Sufficient Explanations for Factored Markov Decision Processes
Piergiorgio Bertoli, Raman Kazhamiakin, Massimo Paolucci, Marco Pistore, Heorhi Raik, Matthias Wagner
Continuous Orchestration of Web Services via Planning

Giuseppe De Giacomo, Riccardo De Masellis, Fabio Patrizi
Composition of Partially Observable Services Exporting their Behaviour
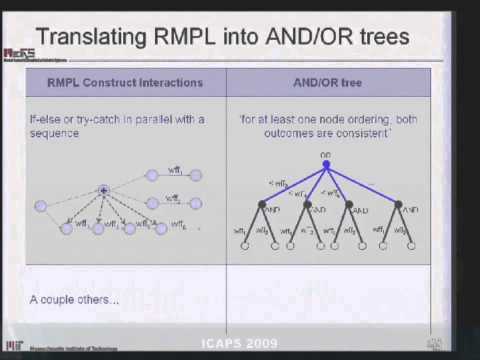
Robert Effinger, Brian Williams, Gerard Kelly, Michael Sheehy
Dynamic Controllability of Temporally-Flexible Reactive Programs

Patrick Eyerich, Robert Mattmüller, Gabriele Röger
Using the Context-Enhanced Additive Heuristic for Temporal and Numeric Planning