
Ryan Hechenberger, Peter J Stuckey, Daniel Harabor, Pierre Le Bodic and Muhammad Aamir Cheema
Online Computation of Euclidean Shortest Paths in Two Dimensions
Recordings

Bernhard Nebel
On the Computational Complexity of Multi-Agent Pathfinding on Directed Graphs

Diego Aineto, Sergio Jimenez and Eva Onaindia
Observation Decoding with Sensor Models: Recognition Tasks via Classical Planning

Edward Lam and Pierre Le Bodic
New Valid Inequalities in Branch-and-Cut-and-Price for Multi-Agent Path Finding

Jiaoyang Li, Graeme Gange, Daniel Harabor, Peter J. Stuckey, Hang Ma and Sven Koenig
New Techniques for Pairwise Symmetry Breaking in Multi-Agent Path Finding
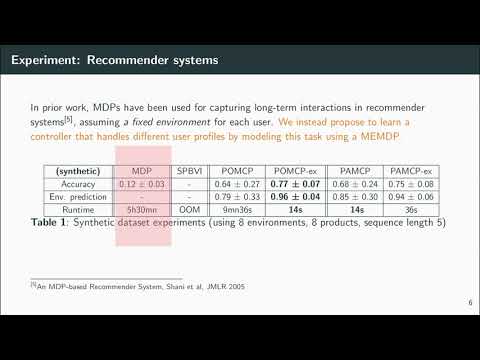
Krishnendu Chatterjee, Martin Chmelík, Deep Karkhanis, Petr Novotný and Amélie Royer
Multiple-Environment Markov Decision Processes: Efficient Analysis and Applications

Daniel Ciolek, Nicolás D’Ippolito, Alberto Pozanco and Sebastian Sardiña
Multi-Tier Automated Planning for Adaptive Behavior

Han Zhang, Jiaoyang Li, Pavel Surynek, Sven Koenig and T. K. Satish Kumar
Multi-Agent Path Finding with Mutex Propagation

Augusto B. Corrêa, Florian Pommerening, Malte Helmert and Guillem Francès
Lifted Successor Generation Using Query Optimization Techniques

Jendrik Seipp, Samuel von Allmen and Malte Helmert
Incremental Search for Counterexample-Guided Cartesian Abstraction Refinement

Tenindra Abeywickrama, Muhammad Aamir Cheema and Sabine Storandt
Hierarchical Graph Traversal for Aggregate k Nearest Neighbors Search in Road Networks

Luke Hunsberger and Roberto Posenato
Faster Dynamic-Consistency Checking for Conditional Simple Temporal Networks

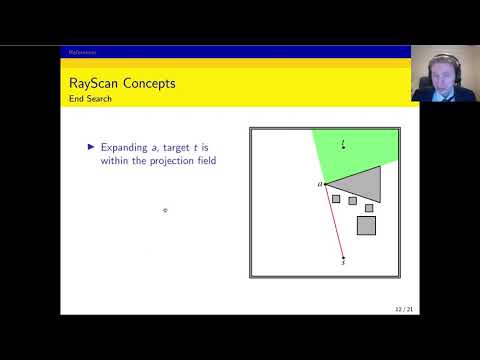
Anahita Mohseni-Kabir, Manuela Veloso and Maxim Likhachev
Efficient Robot Planning for Achieving Multiple Independent Partially Observable Tasks That Evolve over Time

Francesco Fabiano, Alessandro Burigana, Agostino Dovier and Enrico Pontelli
EFP 2.0: A Multi-Agent Epistemic Solver with Multiple E-State Representations

Matteo Zavatteri, Romeo Rizzi and Tiziano Villa
Dynamic Controllability and (J,K)-Resiliency in Generalized Constraint Networks with Uncertainty
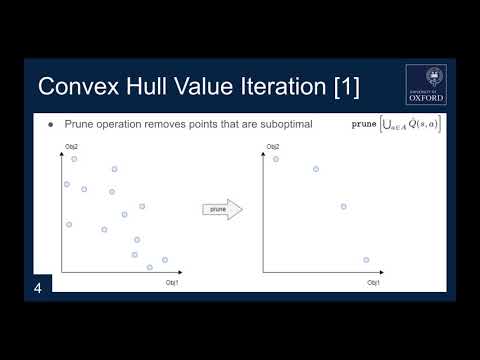
Michael Painter, Bruno Lacerda and Nick Hawes
Convex Hull Monte-Carlo Tree-Search
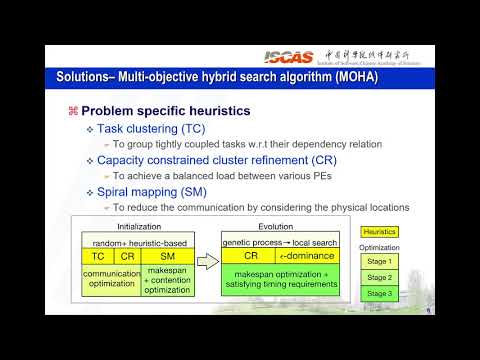
Rongjie Yan, Yupeng Zhou, Anyu Cai, Changwen Li, Yige Yan and Minghao Yin
Contention-Aware Mapping and Scheduling Optimization for NoC-Based MPSoCs

Nguyet Tran, Michael J. Dinneen and Simone Linz
Computing Close to Optimal Weighted Shortest Paths in Practice

Salomé Eriksson and Malte Helmert
Certified Unsolvability for SAT Planning with Property Directed Reachability
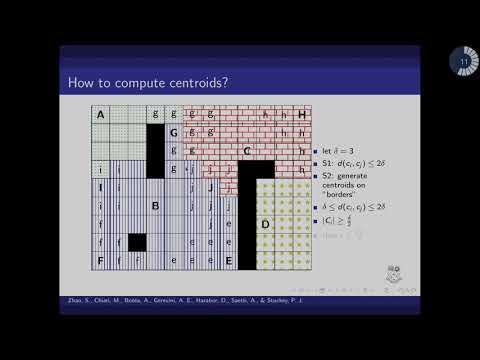
Shizhe Zhao, Mattia Chiari, Adi Botea, Alfonso E. Gerevini, Daniel Harabor, Alessandro Saetti and Peter J. Stuckey
Bounded Suboptimal Path Planning with Compressed Path Databases