

Ryo Kuroiwa and Alex Fukunaga
Analyzing and Avoiding Pathological Behavior in Parallel Best-First Search
Recordings

Omri Kaduri, Eli Boyarski and Roni Stern
Algorithm Selection for Optimal Multi-Agent Pathfinding

Shushman Choudhury, Nate Gruver and Mykel J. Kochenderfer
Adaptive Informative Path Planning with Multimodal Sensing

Carlos Hernández Ulloa, William Yeoh, Jorge A. Baier, Han Zhang, Luis Suazo and Sven Koenig
A Simple and Fast Bi-Objective Search Algorithm

Maximilian Fickert
A Novel Lookahead Strategy for Delete Relaxation Heuristics in Greedy Best-First Search

Peter Trautman and Karankumar Patel
Real Time Crowd Navigation from First Principles of Probability Theory

Caelan Reed Garrett, Tomás Lozano-Pérez and Leslie Pack Kaelbling
PDDLStream: Integrating Symbolic Planners and Blackbox Samplers via Optimistic Adaptive Planning
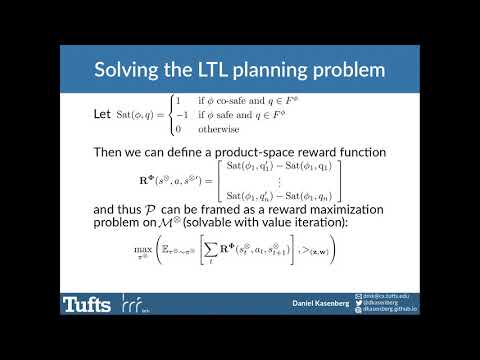
Daniel Kasenberg, Ravenna Thielstrom and Matthias Scheutz
Generating Explanations for Temporal Logic Planner Decisions

Yaniel Carreno, Èric Pairet, Yvan Petillot and Ronald P. A. Petrick
A Decentralised Strategy for Heterogeneous AUV Missions via Goal Distribution and Temporal Planning

Zhiwei (Tony) Qin, Jian Tang, Jieping Ye
Deep Reinforcement Learning with Applications in Transportation
tutorial

Sarah Keren, William Yeoh
Goal Recognition Design
tutorial

Malik Ghallab, Felix Ingrand, Rachid Alami, Thierry Simeon
Integrated Task and Motion Planning
tutorial

Jan Dolejsi, Derek Long, Maria Fox, Christian Muise
From Teaching the PDDL Novice to Empowering the Planning Solution Integrator
tutorial

Michael Cashmore, Daniele Magazzeni
AI Planning for Robotics with ROSPlan
tutorial

Nikhil Bhargava, Brian Williams
Temporal Reasoning
tutorial

Scott Sanner, Stephen F. Smith, Mauro Vallati
Planning and Scheduling Approaches for Urban Traffic Control
tutorial

Roman Barták, Philipp Obermeier, Torsten Schaub, Tran Cao Son, Roni Stern
Multi-Agent Pathfinding: Models, Solvers, and Systems
tutorial

Derek Long
Drilling Down: Planning in the Field

J. Christopher Beck
Local Optima in Planning and Neural Sequence Decoding

Anca Dragan
Planning for Human-Robot Interaction